服务咨询电话:
0734-8853689
0734-8853689


本发明涉及数控机床技术领域,具体为一种基于人工智能的高精度数控机床,包括数控机架,所述数控机架正面的两侧均设置有封闭门,且数控机架的背面设置有固定架。本发明通过在放料架的顶部设置定位组件,通过定位组件对不同规格尺寸的板件进行定位夹持,保证板件在数控机架内部的加工稳定性,根据不同规格尺寸的板件对定位组件进行灵活调控,从而适用于不同规格尺寸板件的定位夹持,既提高了对板件的加工效率,又保证了对板件的加工精度;利用刀头安装座内部的电动夹块对放置槽内部的加工刀头顶端进行夹持,实现对加工刀头的自动更换操作,
1.一种基于人工智能的高精度数控机床,包括数控机架(1),所述数控机架(1)正面的
两侧均设置有封闭门(2),且数控机架(1)的背面设置有固定架(3),其特征在于:所述数控
机架(1)的内部转动设置有放料架(4),且放料架(4)的顶部设置有定位组件,通过定位组件
所述定位组件包括定位架(5)和定位块(6),所述放料架(4)顶部的两侧均活动设置有
定位架(5),且两个定位架(5)相对的一侧均活动设置有两个定位块(6),所述放料架(4)顶
部的中部和两个定位架(5)内部的一侧均设置有电动滑台,通过电动滑台驱动两个定位架
(5)和定位架(5)一侧的两个定位块(6)进行相对移动,所述定位块(6)的内部还设置有直角
所述数控机架(1)的内部转动设置有驱动丝杆(9),且驱动丝杆(9)的表面还螺纹设置
有清理架(10),所述清理架(10)的背面与数控机架(1)内壁的背面滑动连接,且清理架(10)
所述数控机架(1)内部的上方设置有加工组件,通过加工组件对板件表面上的任意加
所述固定架(3)的内部还设置有换料组件,通过换料组件对加工刀头进行灵活更换;
所述换料组件包括换料架(16)和刀头架(17),所述固定架(3)的内部转动设置有换料
架(16),且换料架(16)的内部设置有四个推料槽(18)和四个活动槽(19),所述活动槽(19)
的内部滑动设置有刀头架(17),且刀头架(17)的内部设置有两个放置槽,所述固定架(3)底
部的一侧设置有第二伺服电缸(24),且固定架(3)的内部还活动设置有活动块(25),所述活
动块(25)的内部设置有第三伺服电缸(26),且第三伺服电缸(26)的驱动端固定设置有电磁
铁(27),所述刀头架(17)靠近推料槽(18)的一侧设置有金属片,所述活动块(25)的底部设
置有两个滑杆(28),且两个滑杆(28)的底端均与固定架(3)的内部滑动连接。好博体育官方
2.根据权利要求1所述的一种基于人工智能的高精度数控机床,其特征在于:所述数控
机架(1)内部的前侧还设置有固定块(7),且固定块(7)的内部转动设置有导料辊(8),所述
3.根据权利要求1所述的一种基于人工智能的高精度数控机床,其特征在于:所述数控
机架(1)内壁的底部且位于放料架(4)的前后侧均设置有排料槽,两个所述封闭门(2)的背
面均设置有除尘槽,所述数控机架(1)的内部还分别设置有排料泵和抽气泵,且排料泵的进
4.根据权利要求3所述的一种基于人工智能的高精度数控机床,其特征在于:所述数控
机架(1)一侧的底部分别设置有排水口和集尘口,且排水口的内部与排料泵的出水端连接,
5.根据权利要求1所述的一种基于人工智能的高精度数控机床,其特征在于:所述数控
机架(1)的内部还设置有送液泵和吹气泵,且送液泵的出料端通过弹性导管与喷液孔的内
6.根据权利要求1所述的一种基于人工智能的高精度数控机床,其特征在于:所述加工
组件包括第一安装架(11)和第二安装架(12),所述数控机架(1)内部的上方固定设置有两
个第一安装架(11),且第一安装架(11)的顶部通过电动滑台滑动设置有第二安装架(12),
所述第二安装架(12)的顶部通过电动滑台滑动设置有连接架(13),且连接架(13)的一侧固
7.根据权利要求6所述的一种基于人工智能的高精度数控机床,其特征在于:所述连接
架(13)底部的一侧还活动设置有安装块(15),且安装块(15)的一侧与第一伺服电缸(14)的
驱动端底端固定连接,所述安装块(15)的底部设置有刀头安装座,且刀头安装座的底部活
8.根据权利要求1所述的一种基于人工智能的高精度数控机床,其特征在于:所述放置
槽内部的下方设置有两个微型电缸(20),且两个微型电缸(20)的驱动端均设置有夹板,所
述换料架(16)外周面的一侧设置有齿条(21),且固定架(3)的内部通过电机转动设置有与
齿条(21)相啮合的齿轮(22),所述数控机架(1)内壁的背面设置有换料口(23),且换料口
[0001]本发明涉及数控机床技术领域,具体为一种基于人工智能的高精度数控机床。
[0002]数控机床是按照事先编制好的加工程序,自动地对被加工工件进行加工。我们把
工件的加工工艺路线、工艺参数、刀具的运动轨迹、位移量、切削参数以及辅助功能,按照数
控机床规定的指令代码及程序格式编写成加工程序单,再把这程序单中的内容记录在控制
介质上,然后输入到数控机床的数控装置中,从而指挥机床加工工件。人工智能数控机床是
[0003]目前的数控机床在应用时,由于工件的加工孔洞不同,需要进行不同型号的加工
刀头进行使用,采用人工对加工刀头进行更换的方式不仅费时费力,而且对加工刀头的更
换效率还低,为此,我们提出了一种基于人工智能的高精度数控机床,能够实现对不同规格
型号工件的稳定夹持,同时还能够根据加工孔洞的不同进行不同型号加工刀头的自动更
[0004]本发明目的在于提供一种基于人工智能的高精度数控机床,旨在设计一种基于人
工智能的高精度数控机床,能够实现对不同规格型号工件的稳定夹持,同时还能够根据加
工孔洞的不同进行不同型号加工刀头的自动更换,从而提高对工件的加工效率和加工精
[0005]为了实现上述效果,本发明所采用的技术方案为:一种基于人工智能的高精度数
控机床,包括数控机架,所述数控机架正面的两侧均设置有封闭门,且数控机架的背面设置
有固定架,所述数控机架的内部转动设置有放料架,且放料架的顶部设置有定位组件,通过
[0006]所述定位组件包括定位架和定位块,所述放料架顶部的两侧均活动设置有定位
架,且两个定位架相对的一侧均活动设置有两个定位块,所述放料架顶部的中部和两个定
位架内部的一侧均设置有电动滑台,通过电动滑台驱动两个定位架和定位架一侧的两个定
[0007]所述数控机架的内部转动设置有驱动丝杆,且驱动丝杆的表面还螺纹设置有清理
架,所述清理架的背面与数控机架内壁的背面滑动连接,且清理架的底部分别设置有喷液
[0008]所述数控机架内部的上方设置有加工组件,通过加工组件对板件表面上的任意加
[0009]所述固定架的内部还设置有换料组件,通过换料组件对加工刀头进行灵活更换;
[0010]所述换料组件包括换料架和刀头架,所述固定架的内部转动设置有换料架,且换
料架的内部设置有四个推料槽和四个活动槽,所述活动槽的内部滑动设置有刀头架,且刀
头架的内部设置有两个放置槽,所述固定架底部的一侧设置有第二伺服电缸,好博体育官方且固定架的
内部还活动设置有活动块,所述活动块的内部设置有第三伺服电缸,且第三伺服电缸的驱
动端固定设置有电磁铁,所述刀头架靠近推料槽的一侧设置有金属片,所述活动块的底部
[0011]优选的,所述数控机架内部的前侧还设置有固定块,且固定块的内部转动设置有
[0012]优选的,所述数控机架内壁的底部且位于放料架的前后侧均设置有排料槽,两个
所述封闭门的背面均设置有除尘槽,所述数控机架的内部还分别设置有排料泵和抽气泵,
[0013]优选的,所述数控机架一侧的底部分别设置有排水口和集尘口,且排水口的内部
[0014]优选的,所述数控机架的内部还设置有送液泵和吹气泵,且送液泵的出料端通过
弹性导管与喷液孔的内部连通,吹气泵的出料端通过弹性导管与喷气孔的内部连通。
[0015]优选的,所述加工组件包括第一安装架和第二安装架,所述数控机架内部的上方
固定设置有两个第一安装架,且第一安装架的顶部通过电动滑台滑动设置有第二安装架,
所述第二安装架的顶部通过电动滑台滑动设置有连接架,且连接架的一侧固定设置有第一
[0016]优选的,所述连接架底部的一侧还活动设置有安装块,且安装块的一侧与第一伺
服电缸的驱动端底端固定连接,所述安装块的底部设置有刀头安装座,且刀头安装座的底
[0017]优选的,所述放置槽内部的下方设置有两个微型电缸,且两个微型电缸的驱动端
均设置有夹板,所述换料架外周面的一侧设置有齿条,且固定架的内部通过电机转动设置
有与齿条相啮合的齿轮,所述数控机架内壁的背面设置有换料口,且换料口的内部活动设
[0019]1、通过在放料架的顶部设置定位组件,通过定位组件对不同规格尺寸的板件进行
定位夹持,保证板件在数控机架内部的加工稳定性,在将板件向数控机架的内部上料时,利
用数控机架内壁一侧的激光测距传感器对板件的尺寸进行自动检测,板件在后侧两个定位
块的带动下在放料架的顶部放置,最后通过前侧的两个定位块对板件的前侧进行定位夹
持,根据不同规格尺寸的板件对定位组件进行位置的灵活调控,从而适用于不同规格尺寸
[0020]2、通过在固定架的内部设置转动的换料架,在对加工刀头进行更换时,根据板件
上孔洞的加工型号进行选择,对加工刀头进行更换,选择相应刀头架内部的刀头进行更换,
第三伺服电缸的驱动端带动刀头架穿过换料口进入数控机架的内部,再通过第一伺服电缸
的驱动端带动安装块向下运动,将刀头安装座底部的加工刀头放置在刀头架上其中一个放
置槽的内部,接着刀头安装座移动至待更换加工刀头的正上方继续下降,利用刀头安装座
内部的电动夹块对放置槽内部的加工刀头顶端进行夹持,完成对加工刀头的自动更换操
作,根据不同的孔洞加工进行加工刀头的灵活更换,不仅能够提高对板件的加工效率,还显
[0021]3、通过喷液孔向板件的表面进行冷却液的喷淋,同时利用喷气孔向板件的表面进
行喷气处理,利用冷却液对板件的加工位置进行冷却处理,同时还能够起到抑制加工烟尘
的效果,配合喷气口将板件表面的加工碎屑向前后侧吹出,利用放料架前后侧的排料槽将
[0022]为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附
图作简单地介绍,应当理解,以下附图仅表示出了本发明的部分实施例,因此不应看作是对
范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这
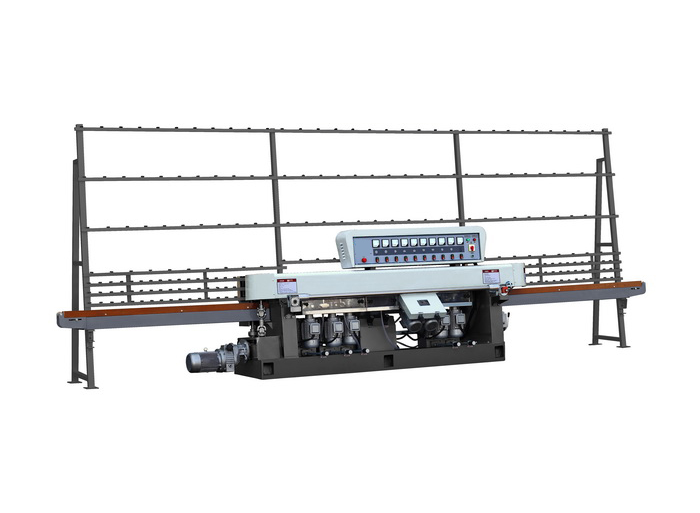
[0023]图1是本发明实施例一种基于人工智能的高精度数控机床结构的示意图;
[0031]图中,1、数控机架;2、封闭门;3、固定架;4、放料架;5、定位架;6、定位块;7、固定
块;8、导料辊;9、驱动丝杆;10、清理架;11、第一安装架;12、第二安装架;13、连接架;14、第
一伺服电缸;15、安装块;16、换料架;17、刀头架;18、推料槽;19、活动槽;20、微型电缸;21、
齿条;22、齿轮;23、换料口;24、第二伺服电缸;25、活动块;26、第三伺服电缸;27、电磁铁;
[0034]请参阅图1至图8所示,本实施例公开了一种基于人工智能的高精度数控机床,包
括数控机架1,数控机架1正面的两侧均设置有封闭门2,且数控机架1的背面设置有固定架
[0035]数控机架1的内部转动设置有放料架4,且放料架4的顶部设置有定位组件,通过定
位组件对不同规格尺寸的板件进行定位夹持,保证板件在数控机架1内部的加工稳定性,其
中放料架4的两侧均位于数控机架1的内部转动设置,且放料架4的两端均通过电机驱动。
[0036]进一步的,定位组件包括定位架5和定位块6,放料架4顶部的两侧均活动设置有定
位架5,且两个定位架5相对的一侧均活动设置有两个定位块6,放料架4顶部的中部和两个
定位架5内部的一侧均设置有电动滑台,通过电动滑台驱动两个定位架5和定位架5一侧的
[0037]再进一步的,数控机架1内部的前侧还设置有固定块7,且固定块7的内部转动设置
有导料辊8,数控机架1内壁的背面还设置有激光测距传感器,通过激光测距传感器对待加
工板件的尺寸进行智能检测,在对板件进行送料时,通过固定块7顶部的导料辊8将板件顺
[0038]需要说明的是,在对待加工的板件进行送料时,通过控制两个封闭门2向两侧开
启,接着将板件送入数控机架1的内部,利用固定块7顶部的导料辊8对板件的底部进行滚动
支撑,在将板件向数控机架1的内部上料时,利用数控机架1内壁一侧的激光测距传感器对
板件的尺寸进行自动检测,将板件的尺寸检测数据传输至控制器,控制器再控制放料架4上
的两个定位架5进行定位滑动,同时控制放料架4的后侧向上翻转,将板件向数控机架1的内
部推送,直至板件的后侧与两个定位块6的一侧接触,接着后侧的两个定位块6同步向后移
动,板件在两个定位块6的带动下在放料架4的顶部放置,最后通过前侧的两个定位块6对板
件的前侧进行定位夹持,根据不同规格尺寸的板件对定位组件进行位置的灵活调控,从而
适用于不同规格尺寸板件的定位夹持,既提高了对板件的加工效率,又保证了对板件的加
[0039]进一步的,数控机架1内壁的底部且位于放料架4的前后侧均设置有排料槽,两个
封闭门2的背面均设置有除尘槽,数控机架1的内部还分别设置有排料泵和抽气泵,且排料
泵的进料端与排料槽的内部连通,抽气泵的进料端与除尘口的内部连通,数控机架1一侧的
底部分别设置有排水口和集尘口,且排水口的内部与排料泵的出水端连接,集尘口的内部
[0040]再进一步的,数控机架1的内部转动设置有驱动丝杆9,且驱动丝杆9的表面还螺纹
设置有清理架10,清理架10的背面与数控机架1内壁的背面滑动连接,且清理架10的底部分
别设置有喷液孔和喷气孔,数控机架1的内部还设置有送液泵和吹气泵,且送液泵的出料端
通过弹性导管与喷液孔的内部连通,吹气泵的出料端通过弹性导管与喷气孔的内部连通。
[0041]需要说明的是,在对放料架4上的板件进行加工时,通过喷液孔向板件的表面进行
冷却液的喷淋,同时利用喷气孔向板件的表面进行喷气处理,利用冷却液对板件的加工位
置进行冷却处理,同时还能够起到抑制加工烟尘的效果,配合喷气口将板件表面的加工碎
屑向前后侧吹出,利用放料架4前后侧的排料槽将杂质混合液进行送出,保证板件在完成加
[0043]本实施例作为上述实施例1中方案的进一步补充说明,数控机架1内部的上方设置
有加工组件,通过加工组件对板件表面上的任意加工位置进行打孔加工,提高对板件的加
[0044]进一步的,加工组件包括第一安装架11和第二安装架12,数控机架1内部的上方固
定设置有两个第一安装架11,且第一安装架11的顶部通过电动滑台滑动设置有第二安装架
12,第二安装架12的顶部通过电动滑台滑动设置有连接架13,且连接架13的一侧固定设置
有第一伺服电缸14,连接架13底部的一侧还活动设置有安装块15,且安装块15的一侧与第
一伺服电缸14的驱动端底端固定连接,安装块15的底部设置有刀头安装座,且刀头安装座
的底部活动设置有加工刀头,其中安装块15的内部设置有用于驱动刀头安装座转动的电
机,刀头安装座的内部设置有电动夹块,利用电动夹块对加工刀头在刀头安装座的内部进
[0045]需要说明的是,在对板件的表面进行打孔加工时,通过第一安装架11上的电动滑
台带动第二安装架12进行横向滑动设置,再通过第二安装架12上的电动滑台带动连接架13
进行纵向滑动,对加工刀头的位置进行灵活调节,最后通过第一伺服电缸14的驱动端带动
安装块15在连接架13下方向下移动,让加工刀头对板件的表面进行孔洞加工,通过对加工
[0047]本实施例与实施例1以及实施例2的不同之处在于,本实施例中还公开了换料组
件,固定架3的内部还设置有换料组件,通过换料组件对加工刀头进行灵活更换,从而提高
[0048]进一步的,换料组件包括换料架16和刀头架17,固定架3的内部转动设置有换料架
16,且换料架16的内部设置有四个推料槽18和四个活动槽19,其中四个推料槽18和四个活
动槽19均关于换料架16的中心轴线呈等角度分布设置,且四个推料槽18均与四个活动槽19
镜像设置,活动槽19的内部滑动设置有刀头架17,且刀头架17的内部设置有两个放置槽,放
置槽内部的下方设置有两个微型电缸20,且两个微型电缸20的驱动端均设置有夹板,换料
架16外周面的一侧设置有齿条21,且固定架3的内部通过电机转动设置有与齿条21相啮合
的齿轮22,通过齿轮22带动齿条21进行转动,从而控制换料架16在固定架3的内部进行转
动;数控机架1内壁的背面设置有换料口23,好博体育官方且换料口23的内部活动设置有挡板;
[0049]再进一步的,固定架3底部的一侧设置有第二伺服电缸24,且固定架3的内部还活
动设置有活动块25,活动块25的内部设置有第三伺服电缸26,且第三伺服电缸26的驱动端
固定设置有电磁铁27,刀头架17靠近推料槽18的一侧设置有金属片,活动块25的底部设置
[0050]需要说明的是,在对加工刀头进行更换时,根据板件上孔洞的加工型号进行选择,
对加工刀头进行更换,选择相应刀头架17内部的刀头进行更换,利用齿轮22配合齿条21带
动换料架16进行转动,让待更换的刀头架17转动至换料口23的一侧,接着第二伺服电缸24
的驱动端带动活动块25向上移动,让活动块25进入推料槽18的内部,再通过活动块25内部
的第三伺服电缸26驱动端带动电磁铁27与刀头架17的一侧接触,利用电磁铁27与刀头架17
的一侧吸附,第三伺服电缸26的驱动端带动刀头架17穿过换料口23进入数控机架1的内部,
再通过第一伺服电缸14的驱动端带动安装块15向下运动,将刀头安装座底部的加工刀头放
置在刀头架17上其中一个放置槽的内部,接着刀头安装座移动至待更换加工刀头的正上方
继续下降,利用刀头安装座内部的电动夹块对放置槽内部的加工刀头顶端进行夹持,完成
对加工刀头的自动更换操作,根据不同的孔洞加工进行加工刀头的灵活更换,不仅能够提
[0052]本实施例中公开了一种基于人工智能的高精度数控机床的工作方法,具体包括以
[0053]步骤1:控制两个封闭门2向两侧开启,接着将板件送入数控机架1的内部,利用固
定块7顶部的导料辊8对板件的底部进行滚动支撑,在将板件向数控机架1的内部上料时,利
用数控机架1内壁一侧的激光测距传感器对板件的尺寸进行自动检测,将板件的尺寸检测
数据传输至控制器,控制器再控制放料架4上的两个定位架5进行定位滑动,同时控制放料
架4的后侧向上翻转,将板件向数控机架1的内部推送,直至板件的后侧与两个定位块6的一
侧接触,接着后侧的两个定位块6同步向后移动,板件在两个定位块6的带动下在放料架4的
[0054]步骤2:在对板件的表面进行打孔加工时,通过第一安装架11上的电动滑台带动第
二安装架12进行横向滑动设置,再通过第二安装架12上的电动滑台带动连接架13进行纵向
滑动,对加工刀头的位置进行灵活调节,最后通过第一伺服电缸14的驱动端带动安装块15
[0055]步骤3:在对放料架4上的板件进行加工时,通过喷液孔向板件的表面进行冷却液
的喷淋,同时利用喷气孔向板件的表面进行喷气处理,利用冷却液对板件的加工位置进行
冷却处理,同时还能够起到抑制加工烟尘的效果,配合喷气口将板件表面的加工碎屑向前
[0056]步骤4:在对加工刀头进行更换时,根据板件上孔洞的加工型号进行选择,对加工
刀头进行更换,选择相应刀头架17内部的刀头进行更换,利用齿轮22配合齿条21带动换料
架16进行转动,让待更换的刀头架17转动至换料口23的一侧,接着第二伺服电缸24的驱动
端带动活动块25向上移动,让活动块25进入推料槽18的内部,再通过活动块25内部的第三
伺服电缸26驱动端带动电磁铁27与刀头架17的一侧接触,利用电磁铁27与刀头架17的一侧
吸附,第三伺服电缸26的驱动端带动刀头架17穿过换料口23进入数控机架1的内部,再通过
第一伺服电缸14的驱动端带动安装块15向下运动,将刀头安装座底部的加工刀头放置在刀
头架17上其中一个放置槽的内部,接着刀头安装座移动至待更换加工刀头的正上方继续下
降,利用刀头安装座内部的电动夹块对放置槽内部的加工刀头顶端进行夹持,完成对加工
[0057]同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
[0058]本发明不局限于上述可选的实施方式,任何人在本发明的启示下都可得出其他各
种形式的产品。上述具体实施方式不应理解成对本发明的保护范围的限制,本发明的保护
2、成为VIP后,下载本文档将扣除1次下载权益。下载后,不支持退款、换文档。如有疑问加。
3、成为VIP后,您将拥有八大权益,权益包括:VIP文档下载权益、阅读免打扰、文档格式转换、高级专利检索、专属身份标志、高级客服、多端互通、版权登记。
4、VIP文档为合作方或网友上传,每下载1次, 网站将根据用户上传文档的质量评分、类型等,对文档贡献者给予高额补贴、流量扶持。如果你也想贡献VIP文档。上传文档
一种基于多组学分析揭示乙酰化修饰在银杏类黄酮生物合成中的重要性的方法.pdf
2025年云南省能源投资集团有限公司人员招聘笔试备考题库及答案解析.docx
原创力文档创建于2008年,本站为文档C2C交易模式,即用户上传的文档直接分享给其他用户(可下载、阅读),本站只是中间服务平台,本站所有文档下载所得的收益归上传人所有。原创力文档是网络服务平台方,若您的权利被侵害,请发链接和相关诉求至 电线) ,上传者
张总 13905181235

服务热线